




At Replit, we want to give our users access to the most powerful agentic coding system in the world—one that amplifies their productivity and minimizes the time from idea to product.
Today, Replit Agent tackles more complex tasks than ever before. As a result, average session durations have increased and trajectories have grown longer, with the agent completing more work autonomously. But longer trajectories introduce a novel challenge: model-based failures can compound, and unexpected behaviors can surface. Every trajectory is unique, so static prompt-based rules often fail to generalize—or worse, pollute the context as they scale. This demands a new approach to guiding the agent when failures are detected.
Our insight: the execution environment itself can be that guide. The environment already plays a critical role in any agentic system—but what if it could do more than just execute? What if it could provide intelligent feedback that helps the agent course-correct, all while keeping a human in the loop? In this post, we discuss a set of techniques that have proven effective on long trajectories, significantly improving Replit Agent across building, planning, deployment, and overall code quality—while keeping costs and context in check.

The Problem with Static Prompts on Long Trajectories
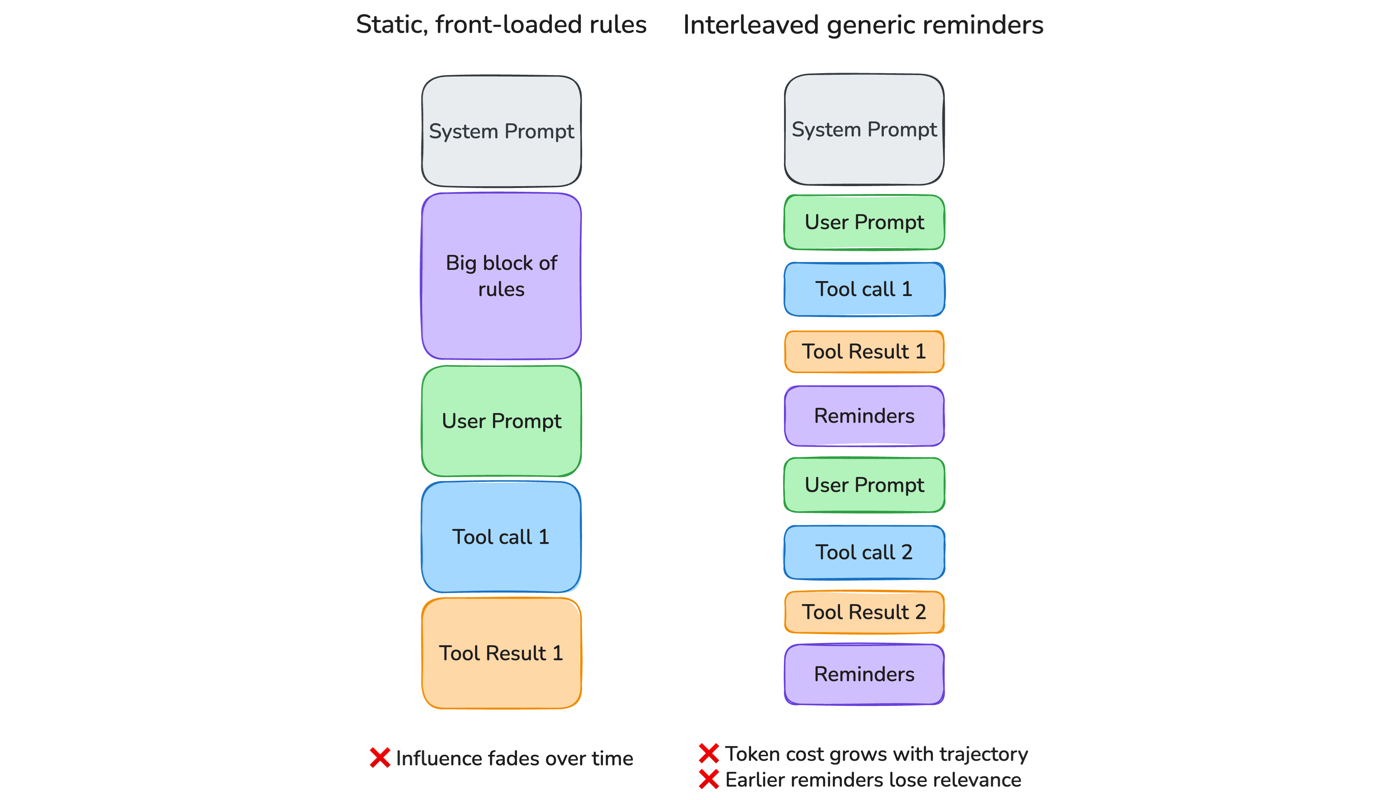
System prompts and few-shot examples are the classic way to steer an agent by specifying intent and constraints up front. In practice, many production agents also rely on execution-time scaffolding—task lists, reminders, and other lightweight control signals—that are updated as the agent observes tool output and responds to user input.
These approaches work reasonably well for a wide range of use cases, especially when tasks are constrained and interactions are short. But as agents operate over longer interactions with humans in the loop, decisions accumulate and feedback arrives continuously. In this regime, guidance applied uniformly or too early loses leverage, and maintaining reliable behavior becomes progressively harder.
Several problems emerge:
- Learned priors can override written rules: Even with explicit instructions, models may fall back to behaviors learned during pre-training or post-training when rules are verbose, ambiguous, or conflicting [1].
- Instruction-following degrades as context grows: Due to primacy bias and recency bias [2,3] — instructions near the beginning and end of the context tend to carry more weight, while mid-context rules have reduced influence.
- More rules have diminishing returns: Adding constraints increases cost and priority ambiguity, and often forces the model to reason over rules that don’t matter for the current decision—leading to partial or inconsistent compliance rather than better control.
These problems makes agent less reliable and sometimes more expensive in the long trajectories as shown in Figure 1. Therefore, effective control needs to intervene at decision time, aligning guidance with the agent’s execution lifecycle rather than front-loading every constraint in advance.
Think of this as rails and signals — not a locked track.
The Curse of Reminders
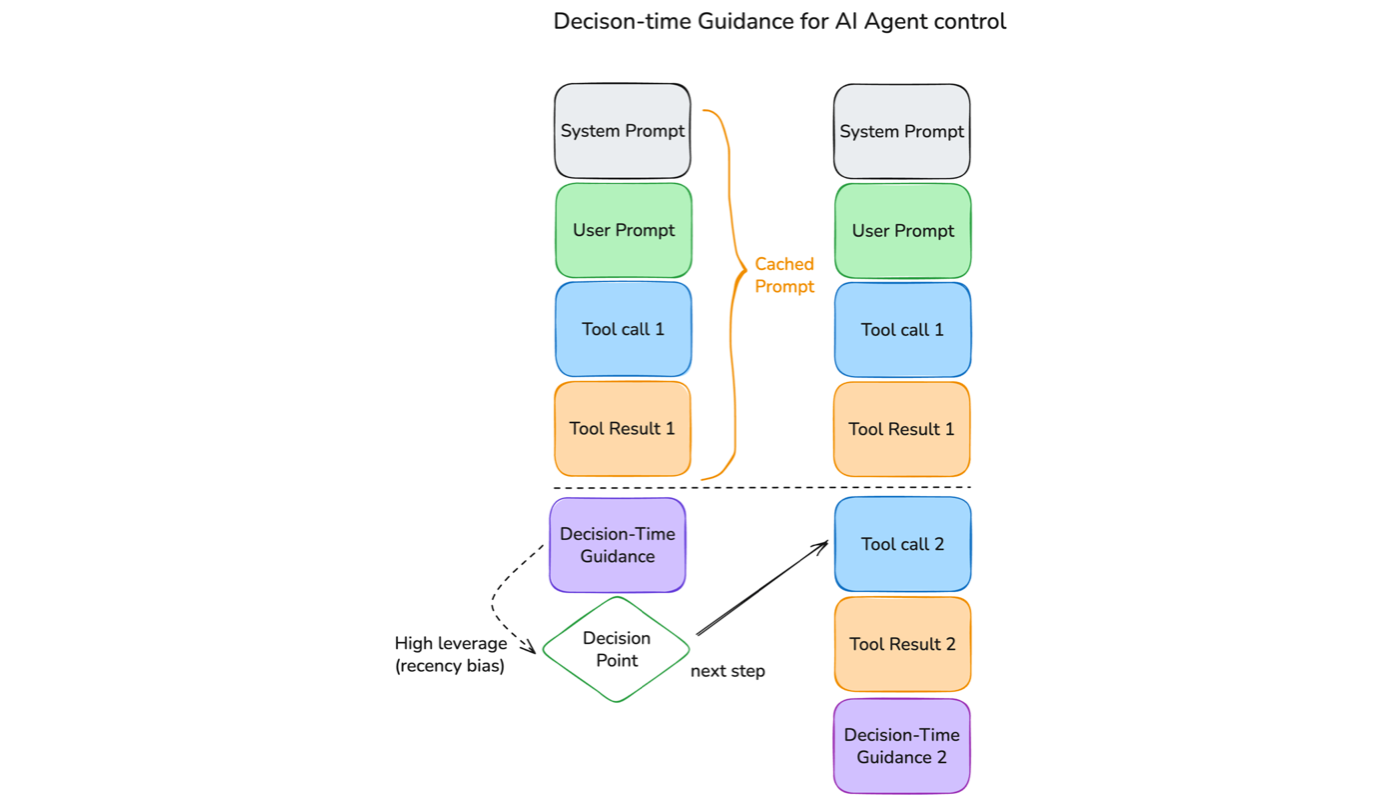
If static prompts fail because they're too far from the decision, why not inject guidance right before the model generates its next token? This is the intuition behind decision-time injection. Recency bias [2] means models weight later context more heavily, so guidance placed at the end of the trace exerts outsize influence. For example, when we encourage parallel tool calling for Replit agent, injecting a short prompt at the bottom of the trace led the agent to execute 15% more tools per loop than placing the same guidance in the system prompt.
But a naive implementation creates its own problems. If you append every useful reminder to the bottom of the context, you recreate the same failure mode you were trying to escape: a bloated block of instructions, most of which don't apply to the current decision. The model still has to reason over irrelevant rules. Conflicts resurface. Priority becomes ambiguous. You've just moved the mess from the top of the prompt to the bottom.
We observed this directly. Early experiments injecting multiple reminders at decision time showed diminishing returns after the third or fourth, and sometimes negative returns, as competing instructions led to inconsistent behavior. Earlier model generations would often mock data to pass a task or perform dangerous deletions without user confirmation. When we combined a reminder to avoid mock data with three or more other reminders, compliance dropped. Worse, the reminders competed not just with each other but with user messages, degrading human-in-the-loop performance overall.
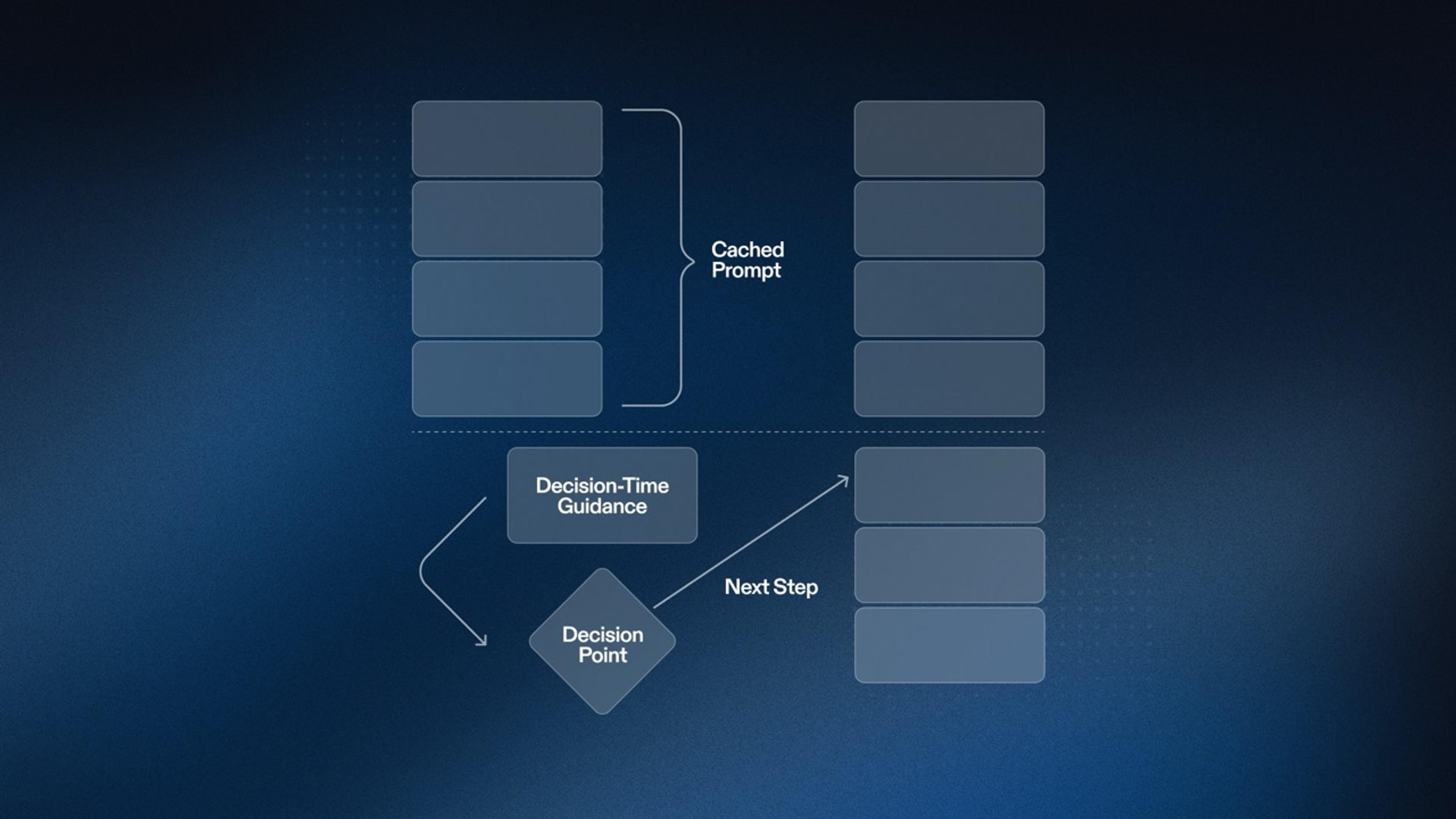
Decision-Time Guidance
We introduce decision-time guidance—a control layer that injects short, situational instructions exactly when they matter, and only when they matter.
The key is selectivity. A lightweight multi-label classifier analyzes the agent's current trajectory—user messages, recent tool results, error patterns—and decides which guidance, if any, to inject. The classifier runs on a fast, cheap model, so it can fire on every agent iteration without becoming a bottleneck.
This moves control out of a monolithic system prompt and into a bank of reusable micro-instructions. We maintain a stable core prompt and dynamically load only what's relevant. Each intervention is short, focused on a single decision, and distilled from failure patterns observed in production. This allows us scale from 4–5 static reminders to hundreds, varying both the number and types of guidance we provide.
Two patterns have proven especially effective in our experience:
Diagnostic signals:
When repeated errors appear in console output, the system injects a short nudge prompting the agent to address failures before continuing. Importantly, this is a notification, not a context dump—the agent is told errors exist and prompted to pull the relevant logs itself. This keeps the injection minimal while giving the agent access to diagnostic information only when it chooses to look.
A simple reminder prompting the agent to read logs looks like this:
Found 1 new browser console log, use the log tool to view the latest logs.Consult when it matters:
When the classifier detects signs of a doom loop—repeated failed attempts, circular edits, or high-risk changes. It injects a reminder to consult an external agent.
The external agent generates a plan from fresh context, unburdened by the failed attempts polluting the main agent's trace. This exploits the generator-discriminator gap [4]: the stuck agent doesn't need to generate its way out, it just needs to recognize a good plan when offered one. And recognition is the easier task.
Also, the consultation is performed by a different model. Switching models at the right moment reduces this self-preference bias [5] and improves reliability when the agent has become anchored to a failing trajectory.
Why this works
False positives are cheap. Because reminders are suggestions rather than hard constraints, the model simply ignores guidance that doesn't apply. This lets us tune for recall over precision, we'd rather catch a failure mode and occasionally misfire than miss it entirely.
Guidance is ephemeral. Injected reminders don't persist in conversation history. Once the decision is made, they disappear. Context accumulates only what remains relevant.
Caching stays intact. The core prompt never changes, so we always hit the prompt cache. Behavior shifts from step to step without paying for prompt rewrites, reducing cost by 90% compared to dynamic system prompt modification.
The result: a control layer that intervenes when it helps, disappears when it doesn't, and costs almost nothing either way.
In conclusion, decision-time guidance has proved to be an effective paradigm for an agent harness designed around the current generation of LLMs, improving both reliability and output quality over long trajectories. As model intelligence and long-horizon capabilities evolve, the role of external feedback as well as tooling will change. For the next generation of models, we expect stronger self-reflection capabilities, making them less likely to require external feedback, along with improved capacity to attend to multiple instructions in parallel.
We're excited to keep pushing the frontier of autonomous agents, with a focus on reliability for the most complex coding tasks. If you are interested in working on the frontier of autonomous software engineering agents, our team is hiring, reach out to [email protected].
Reference
- Control Illusion: The Failure of Instruction Hierarchies in Large Language Models
- Lost in the Middle: How Language Models Use Long Contexts
- RULER: What's the Real Context Size of Your Long-Context Language Models?
- Benchmarking and Improving Generator-Validator Consistency of Language Models
- LLM Evaluators Recognize and Favor Their Own Generations